Swarm Intelligence and Robotics
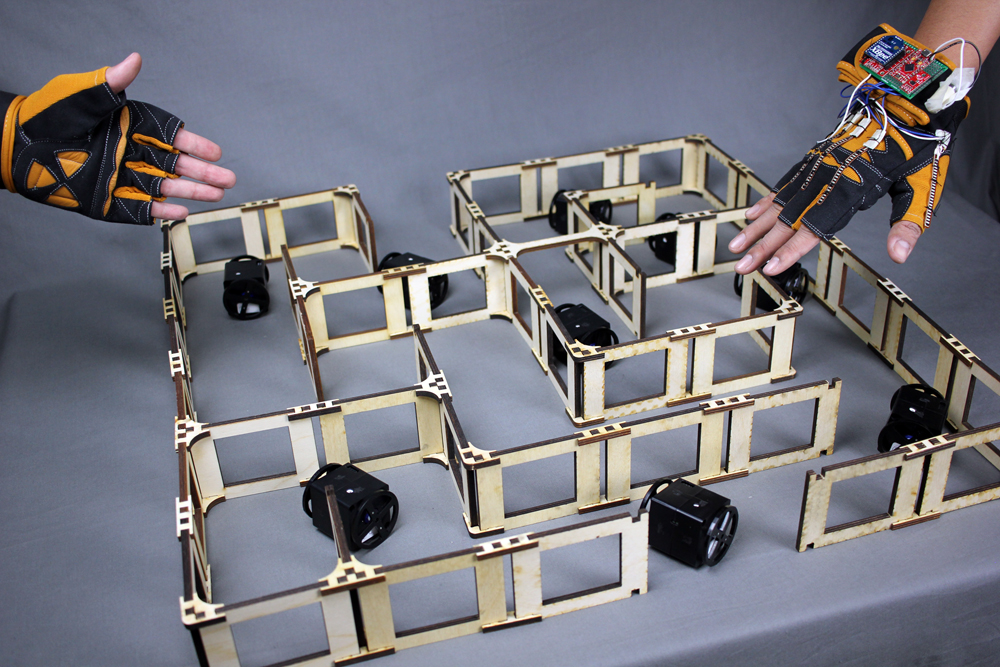
Figure. InchBot-II with smart gloves for gesture-based wireless control.
A robotic swarm and swarm intelligence aims to achieve physical and computational flexibility and increased system robustness in multi-task performance, including localization, mapping, and navigation in an unknown, possibly dynamic, environment. Despite their potential, robotic swarms have not yet been applied to tackle real-world problems, due to challenges in achieving controllable global behaviors in a scalable and distributed manner, and the lack of systematic evaluation methods for task performance. We aim to develop and evaluate scalable and adaptive swarm algorithms, hardware platforms for controllable global behaviors, and effective human-swarm teaming strategies.
FUNDING:
- DARPA OFFensive Swarm-Enabled Tactics (OFFSET) - Sprint 5 (PI: Kiju Lee), 04/03/20 - 04/01/21
- DARPA OFFensive Swarm-Enabled Tactics (OFFSET) - Sprint 3 (PI: Kiju Lee, Co-PIs: Michael Fu, Dustin Tyler, and Wyatt Newman (Case Western Reserve University), 05/07/19 - 03/06/20)